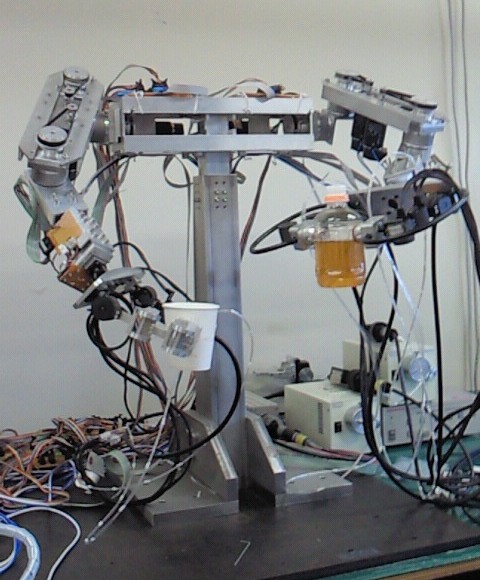
Dual hand-arm robot equipped with three-axis tactile sensors
This is a dual hand-arm robot equipped with three-axis tactile
sensors. Since it accepts not only normal force but also tangential
force applied to its fingers, it can perform several tasks such as
assembling via simple programs.
Videos are shown in the following to demonstrate tasks
accomplishes by this robot:
Object transfer from the left hand to the right hand:
images\Passing(short).wmv
Cap twisting: images\pap&screw.wmv
Object assembling in the air:
images\Assy(short).wmv
|
 |
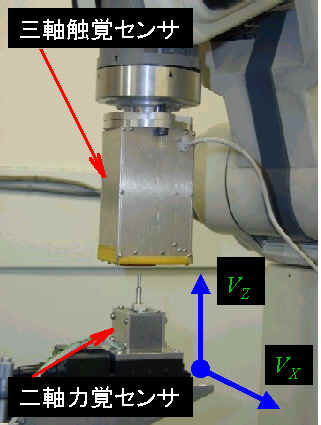
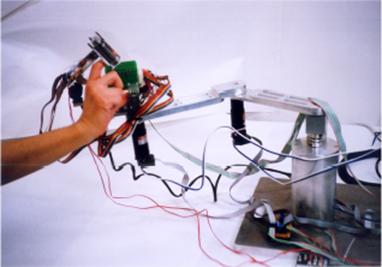
Industrial
manipulator
attached with optical three axis tactile sensor
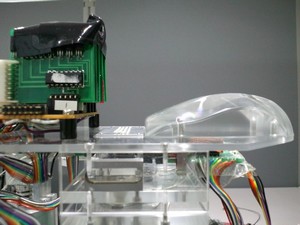
This is an industrial manipulator equipped with a three axis tactile sensor (detail explanation at the research
introduction). This sensor can measure the distribution of the contact
pressure and the shearing force that acts on the sensing surface. The
photograph shows the appearance in which this sensor is calibrated with
the force sensor.
|
 |
|
Optical three axis tactile sensor to install at multi-finger hand
Above-mentioned tactile sensor will be refine to make it smaller size in
order to install at multi-finger hand. The finger quantity is added to
complete the multi-finger hand. Continuously, experiments of recognition
of the object structure, material and insertion work will be perform.
|
 |
|
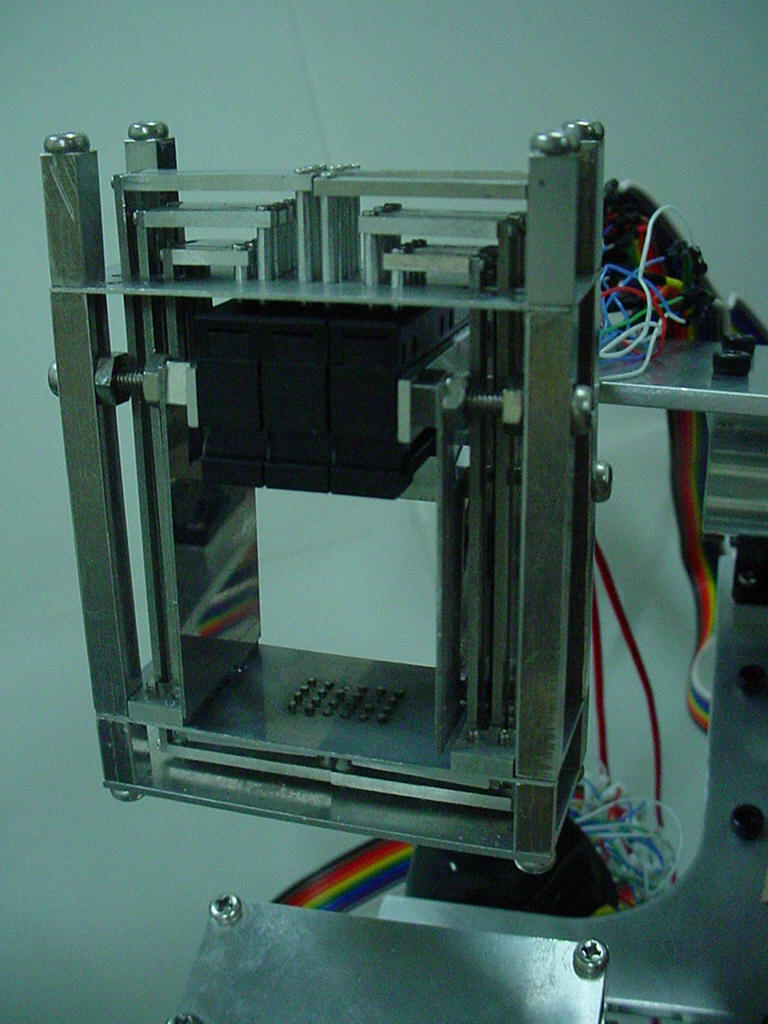
Pressure load device to evaluate the optical three axis tactile sensor
at multi-finger hand This device apply load to
above-developed sensor to evaluate its performance and characteristic. |
 |
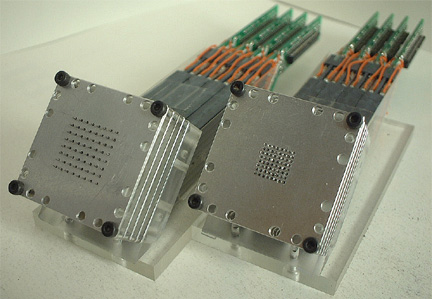
Pressure sensor display
It is a device that presents the surface roughness. The pin of
diameter 0.3mm is arranged in 8×8 arrays. The pins moves up and down
vertically and it stimulates a finger tip of operator. The type of 1mm pitch
(left) and 1.8mm pitch (right) are shown in the figure, respectively.
|
 |
The arm part to install pressure sensor
display
The arm part is developed for installation. The array scale and the
pin diameter of this display are 6×4 and 0.8mm
respectively. The pitch is 2mm.
|
 |
Hand presents pressure sensor and
clutches force.
Above tactile sensor is installed in hand. As a result, we can feel
hardness of the object and ruggedness shape on the
surface, etc.
|
|
| Combination of
tactile and force sensor device 1
Hand presents pressure and clutches force mentioned above is installed
in three links manipulator. Using this device, various experiments such
as virtual peging are conducted.
|
 |
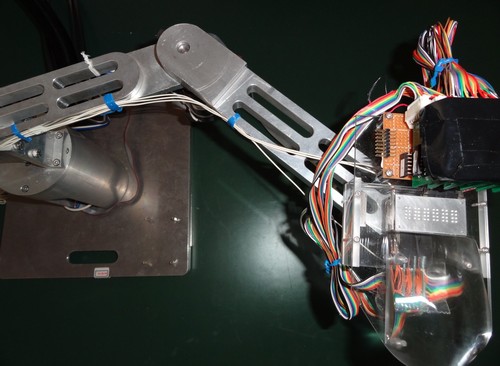
| Combination of
tactile and force sensor device 2 The above-mentioned 1mm
pitch structure display was installed in three link manipulator. The
experiment applying tactile and force sensor simultaneously is conducted
using this device.
|
 |
2.5D Display Generating Tactile and Force Sensations
In this display, compressive forces applied on the display pad can be
obtained from three pressure sensors installed under the actuator array.
Three pressure sensors are arranged on a circle whose central position
is the same as the center of the display pad. The orientation of the
virtual tactile pad is obtained from three pressure values of the
sensors. The z-directional position is obtained from summation of the
three pressure values. Consequently, the operator feels 3D surface even
if the manipulator's motion is within a plan. Virtual 3D surface
obtained from this display is shown in the following video:
images\Sphere
Discrimination (Standard).wmv |
  |
Slippage tactile
display
Subject moves the stick to below direction in order to present the
slip feeling of the subject. This method is use to investigate human's
tactile sensing. |
 |
2D-micro Actuator
Tiny link structure supported by two bimorph piezoelectric actuators
moves in 2D plane. It will be used for slippage tactile display.
(further information) |
 |