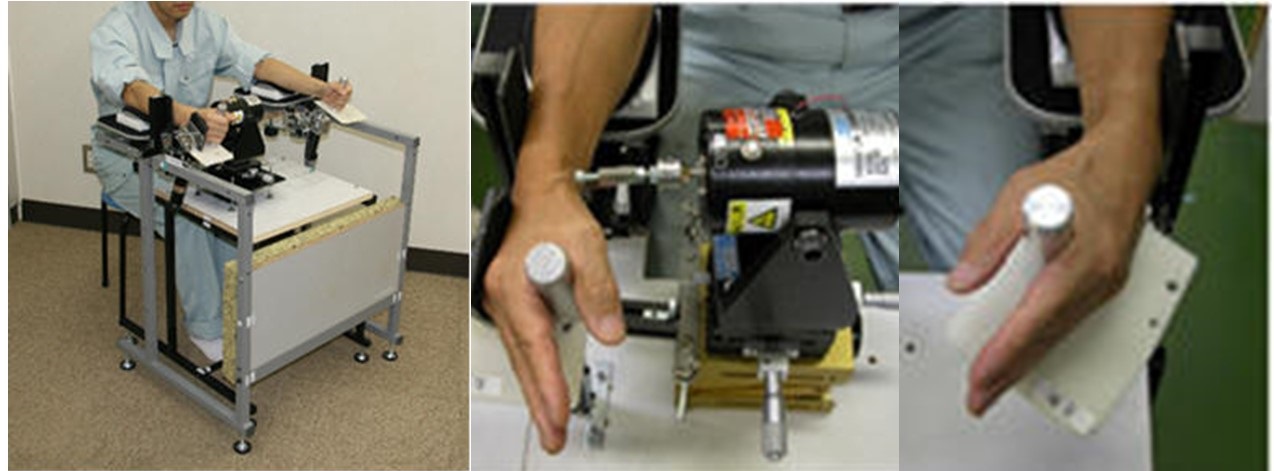
卓上運動錯覚誘発装置
運動錯覚とは,筋や健に適切な振動を与えると,それらの筋や腱が伸びたように感じる錯覚のことです.本装置は,そのような運動錯覚を定量的に評価するために開発されたものです.ボイス・コイル・モータにより,右手の手首の腱に振動を与え,そのとき生じる錯覚量を左手で表現することにより,錯覚をリアルタイムに評価します. |
 |
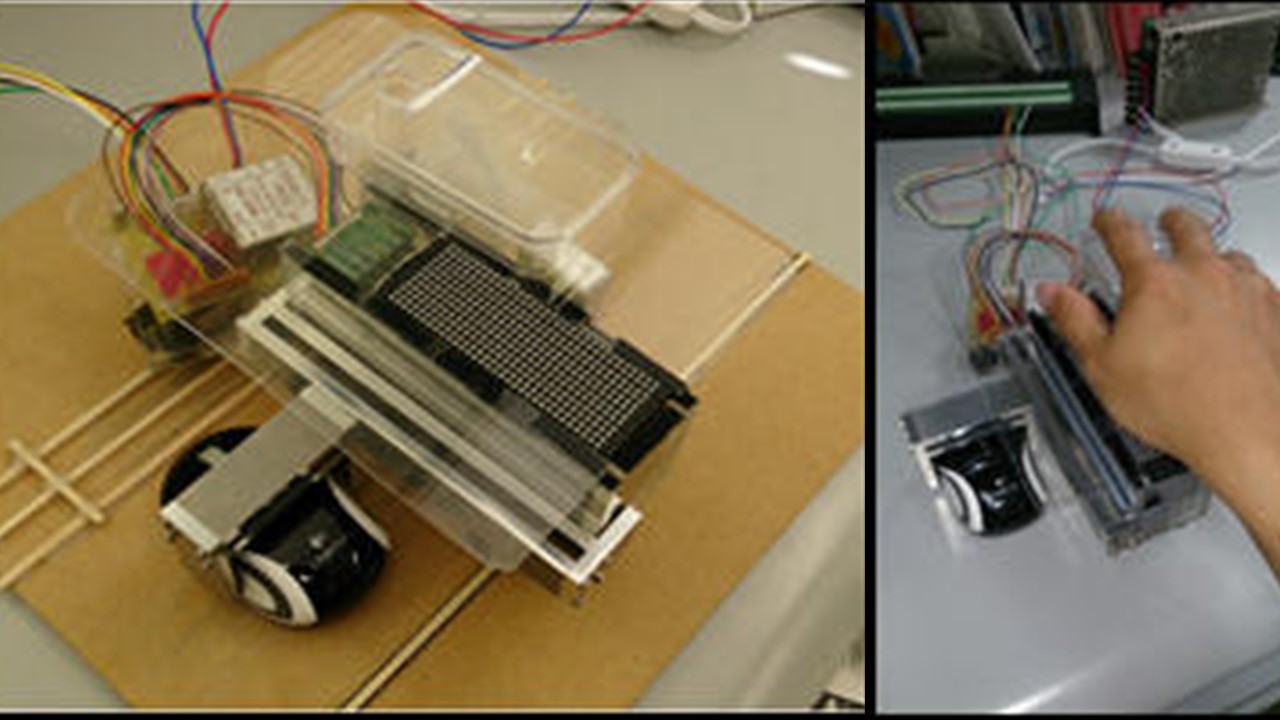
掌呈示型触覚マウス
指先の二点弁別閾は2mm程度と細かいために,指先に表面の凹凸を呈示する触覚ディスプレイには高密度なものが求められる.現状の技術水準では,2mm以下の間隔で広い面積の触覚を呈示できるディスプレイの製作は困難である.そのような高密度の触覚ディスプレイが製作可能となるまで,二点弁別閾が5mm程度の掌に呈示する触覚ディスプレイによって触覚ディスプレイの呈示能力を調査するという目的で開発されたディスプレイである.
ベルバットハンドイリュージョンの誘発:ohka_lab2\images\VR
VHI.MOV
|
 |
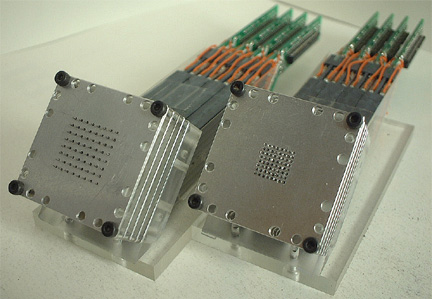
圧覚ディスプレイ
表面粗さを呈示する装置です.8×8のアレイ状に配列された直径0.3mmのピンが上下運動をして人間の指先に刺激を与えます.1mmピッチ(左)と1.8mmピッチ(右)のタイプを示します.
|
 |
ハンド搭載用圧覚ディスプレイ
ハンドに搭載するために開発しました.このディスプレイのアレイ規模とピン径は,それぞれ6×4と0.8mmです.ピッチは2mmです.
|
 |
圧覚・把握力呈示ハンド
上述の触覚ディスプレイをハンドに搭載しました.これにより物体の硬さや,表面の凹凸形状などを感じることができます.
|
|
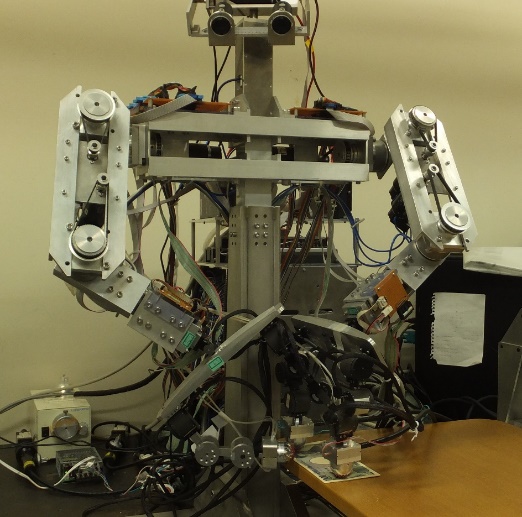
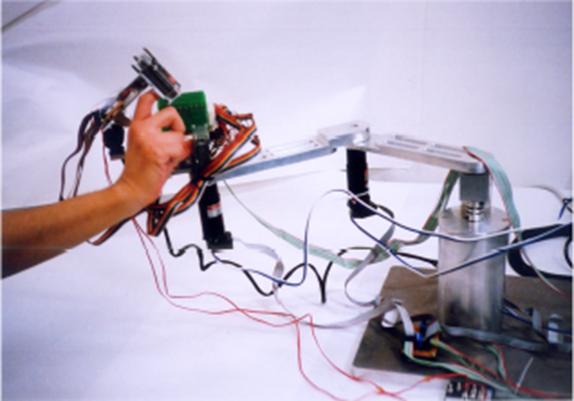
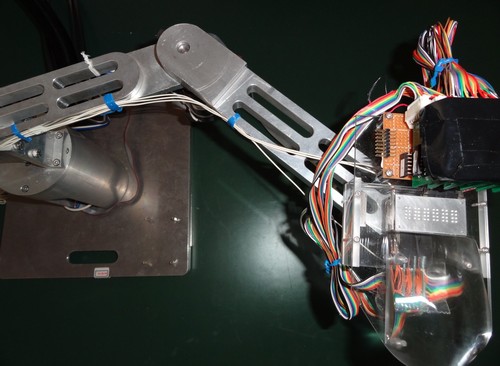
| 触覚と力覚の融合呈示装置1
上述の圧覚・把握力呈示ハンドを3リンクマニピュレータ に搭載しました.この装置を用いて仮想ペグ差しなどの実験を進めています。
|
 |
| 触覚と力覚の融合呈示装置2 前述の1mmピッチ形圧覚ディスプレイを3リンクマニピュレータに搭載しました.この装置を用いて触覚と力覚の同時呈示実験を
進めています.
|
 |
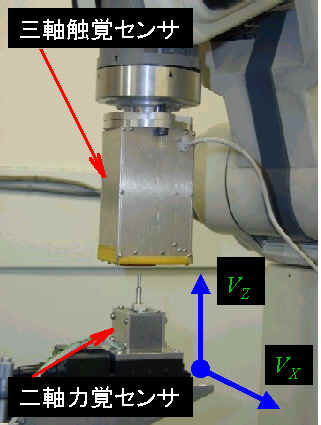
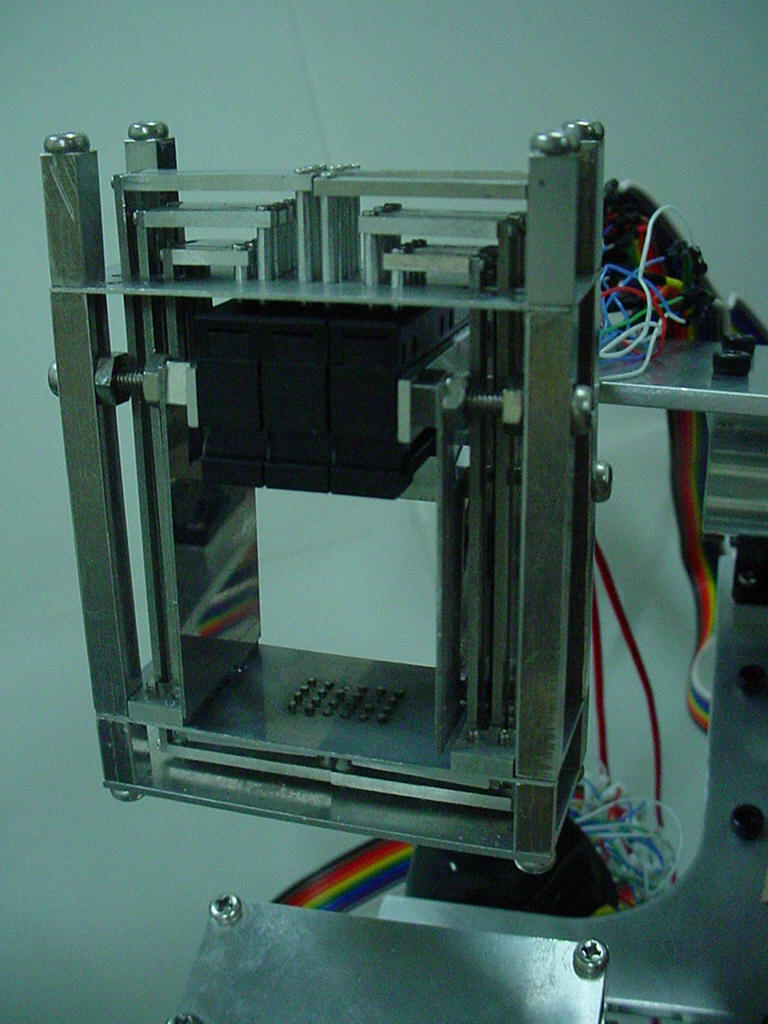
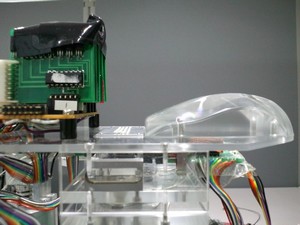
| 触覚と力覚の2.5D複合ディスプレイ
このディスプレイ部の下に3個の圧力センサが円周上等間隔で設置されています.これらから得られる3つの圧力値から,仮想空間内でピッチとロール角,およびz方向の移動量を指定します.マニピュレータの動きは平面内に限定されていますが,力・モーメント情報を加えることによって三次元世界の仮想物体の感触を得ることができます.以下のビデオは,仮想空間内の3D面に触れた場合の様子を示します:
mages\Sphere Discrimination (Standard).wmv |
  |
| マウス搭載圧覚・滑り覚ディスプレイ
圧覚呈示と滑り振動覚を同時呈示できる装置です.サンドペーパーや木目などの表面状態の仮想現実感を演出できます. |
 |
滑り感覚ディスプレイ
被験者が把持している棒が下方向へ運動することによって被験者に滑り感覚を呈示できます.ヒトの触覚を調べるための実験で使用しています. |
 |
パラレル形2軸アクチュエータ
2つのバイモルフアクチュエータに支持されたリンク構造が2自由度の運動をします.触覚呈示装置に活用が期待されています.
(ポスターに詳しい情報があります)
|
 |