|
運動錯覚の研究
|
|
概 要
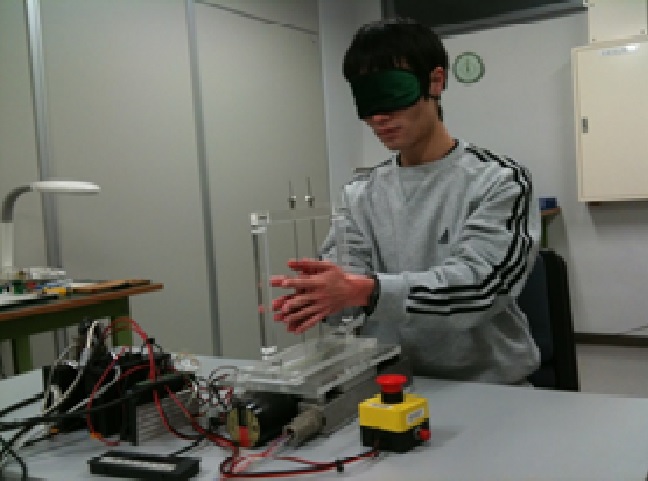
運動錯覚とは、筋や腱に適切な振動刺激を与えると、その筋や腱が伸張する方向に動いたような感覚が生じる錯覚現象の一種である.収縮方向に動く反射とは異なり,動くような気がするだけで実際には動かないという特徴がある.この現象は,筋や腱であれば体中のいたるところで生じる.この現象は1970年代に発見されているが,刺激を明確に統制した実験結果があまりなく,生じる条件は研究者によってかなりの幅がある.
この研究の新規性・独創性
本研究では,精度の高い加振機を用いて,押しつけ力,波形,周波数,振幅を統制して実験を行い,運動錯覚を生じさせる刺激条件を明確にする.そのために,小型の運動錯覚呈示装置を開発した.この装置では,右手に刺激を与えて,その時に生じる運動錯覚を左手で表現できる.リアルタイムに運動錯覚量を求めることが出来る.
応用研究
脳卒中の患者に手の動くイメージ
(動くということはどんなことだったか)をもってもらい,他のリハビリテーションを併用する中で回復を促進するような装置が期待される.
詳細情報
https://www.jstage.jst.go.jp/article/transjsme/80/820/80_2014trans0350/_pdf
|
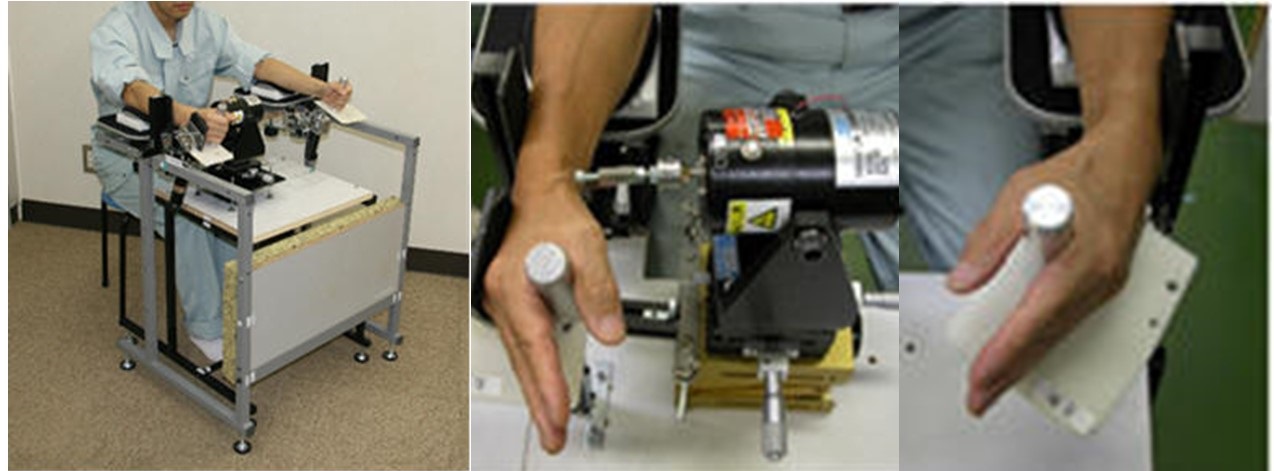
(左から順に、装置外観、手首の腱に振動刺激を与える様子、左手で錯覚量を表現) |
|
三軸触覚センサの開発
|
|
概 要
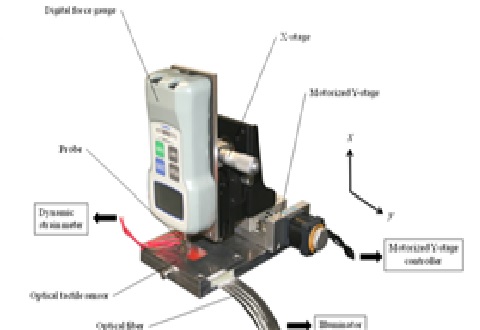
ロボットが滑り落とさずに物体を把持,あるいは表面の摩擦状態から材質を判定するためには滑り力を検出することが有効であるとの考えに基づき,当研究室では種々の三軸触覚センサを開発している.下図は,光の反射を応用した三軸触覚センサで,プローブとして機能するゴム突起の変形状態を反射の状態から計測して三軸力に変換している.現在,右下図に示すように,ヒューマノイド・ロボットに搭載して手探りによる環境情報を獲得してナビゲーションや把握物体の形状・材質認識に関する研究を進めている.
この研究の新規性・独創性
実用レベルの三軸触覚センサが開発された例は少なく,特に多指ハンドに搭載したのは当研究室が初めてである.本センサは光を計測するために,電気的なノイズに対しては高いロバスト性を有している.また,接触部分がシリコンゴムで製作されているために対象物体表面とよく馴染む特長を有している.
応用研究
産業用ロボットへ適用して適用的な組み立て作業を実行したり,人間を傷つけない感覚を有した介護ロボットなどへの応用が考えられる.
詳細情報
http://www.sciencedirect.com/science/article/pii/S1877050917302442
|
(左:三軸触覚センサの構造、右:千円札のめくり取り(動画)) |
|
視覚と触覚を利用したヒトとロボットのコミュニケーション
|
|
概 要
本テーマでは,日常生活の中で,「あれとって」とか「こっちに置いて」などを自然な身振りで指示して,ロボットに働いてもらうことを考えてる.このとき,ロボットと我々はお互いの手が届くくらいの比較的近い距離にいることを想定している.例えば,ロボットに物をとってもらうとき,ロボットがつかんでいるものを最終的には我々の手で受けることになる.そのとき,ロボットの方が力加減をしないと,渡すのではなく勢い余って我々の手を掴んだもので打ってしまう可能性がある.また,その物を床やテーブルに置いてもらう場合でも力加減をしないと,今度は物を衝突させ壊すことや,ひどい場合自分自身を壊してしまう可能性もある.
我々の研究室では,上に述べた,「あれとって」,「こっちに置いて」をマシンビジョンと触覚情報処理を活用して,なるべく自然な形式で実現しようとしている.コミュニケーションの取り方の概念図を左図に示す.ロボットとヒトが見つめ合うことによって,ロボットはヒトが何か要求していることを理解する.この時,画像処理としてヒトの視線追跡が用いられる.次に,ヒトはとってもらいたいものを指差し,画像解析によりロボットは指差されたものを判別しそれを取りに行く.取り上げたものをヒトに渡すとき,ロボットは反力を感じながら,適切な力でヒトに物を渡す.
この研究の新規性・独創性
この研究で用いられているビジョンセンサは,普通のWebカメラであるために,ソフトを組み替えることによっていろいろな処理ができる利点がある.
また,一般の環境下で触覚センサを利用することは,ノイズの影響を受けたり,容易にセンサを壊してしまうが,搭載している三軸触覚センサは,ノイズに強く,タフであるため安定して使用できている.
応用研究
本研究の成果は,
主に家庭利用を想定してて,ヒトとロボットが共にいてお互いに協調して作業したり,ロボットに介助してもらったりする用途に活用できると考えている.
詳細情報
http://thescipub.com/PDF/jcssp.2016.246.254.pdf |
(左:概念図、 右:指さしたものをロボットが手渡す様子(動画)) |
|
ベルベットハンドイリュージョンの解明に関する研究
|
|
概 要
視覚や聴覚とは異なり,接触が不可避であることからディスプレイ実現のためには困難な問題が多い.本研究では,物理的には違っていても脳内で似たように感じる状況を作り出ために錯覚を利用するアプローチを採用する.ここでは錯覚現象のうちVelvet
Hand Illusion(VHI)に着目した.これは,目の粗い針金の網を両手で挟んでこすると,手の間になめらかなフィルムのような感触を受ける錯覚現象である.針金の網ではなく,二本の平行な針金に垂直な方向に両手で一緒にこすったときにも同じ現象が生じる(右図).
本研究では,錯覚現象の統制のしやすさから二本の平行な針金を枠に設置した装置を用いて心理物理実験を行う.錯覚の強さにおける針金の間隔や太さなどの影響などを調査している.
この研究の新規性・独創性
VHIは,従来から知られた現象であるが,そのメカニズムについてまだ十分に明らかにされていない.本研究で初めて心理物理実験により系統的に調査を行っている.たとえば,能動触と受動触を比較して後者の方が強い錯覚が生じることなどは本研究で初めてに明らかにされた実験事実である.
応用研究
本研究の成果は,VHIの強さをアクチュエータによるモーション・コントロールで調整できる可能性を示している.このように,本研究の成果は新しい触覚ディスプレイの開発に役立てられる.
詳細情報
http://s2is.org/Issues/v6/n4/papers/paper12.pdf
|

(左:ステージ上に設置した往復運動する2本の鋼線を両手で挟んでVHIを感じているところ(動画)、右:ネットを両手で挟んでこすってVHIを感じているところ) |
|
触覚マウスによるVHIの呈示
|
|
概 要
上述のVHIをドット・マトリクス型の触覚ディスプレイで呈示できるか検討を進めている.右の欄の左の写真の白い点は,上下運動するピンの先端である.二本線を表示させ,それを往復運動することによって上の二本の鋼線を両手で挟んで二本線を往復運動する状況を再現する.真ん中の写真のように手を置いてその二本線の往復運動を感じると,ディスプレイの表面が柔らかくなめらかに感じることを確認した.心理物理実験により他の試料と比較して,ベルベット生地を1とした場合の結果を右の棒グラフに示す.図からわかるように触覚ディスプレイでも二本の鋼線に匹敵するVHIを演出することができる.
この研究の新規性・独創性
ドット・マトリクス型の触覚ディスプレイは,本来凹凸を表現するものである.それなのに,凹凸感でなく滑らかさが演出できる点が興味深い.
応用研究
この研究を進めることによって,ざらざら感からすべすべ感まで連続して呈示できるディスプレイを開発可能となる.
詳細情報
http://journals.sagepub.com/doi/pdf/10.1177/1729881416658170 |
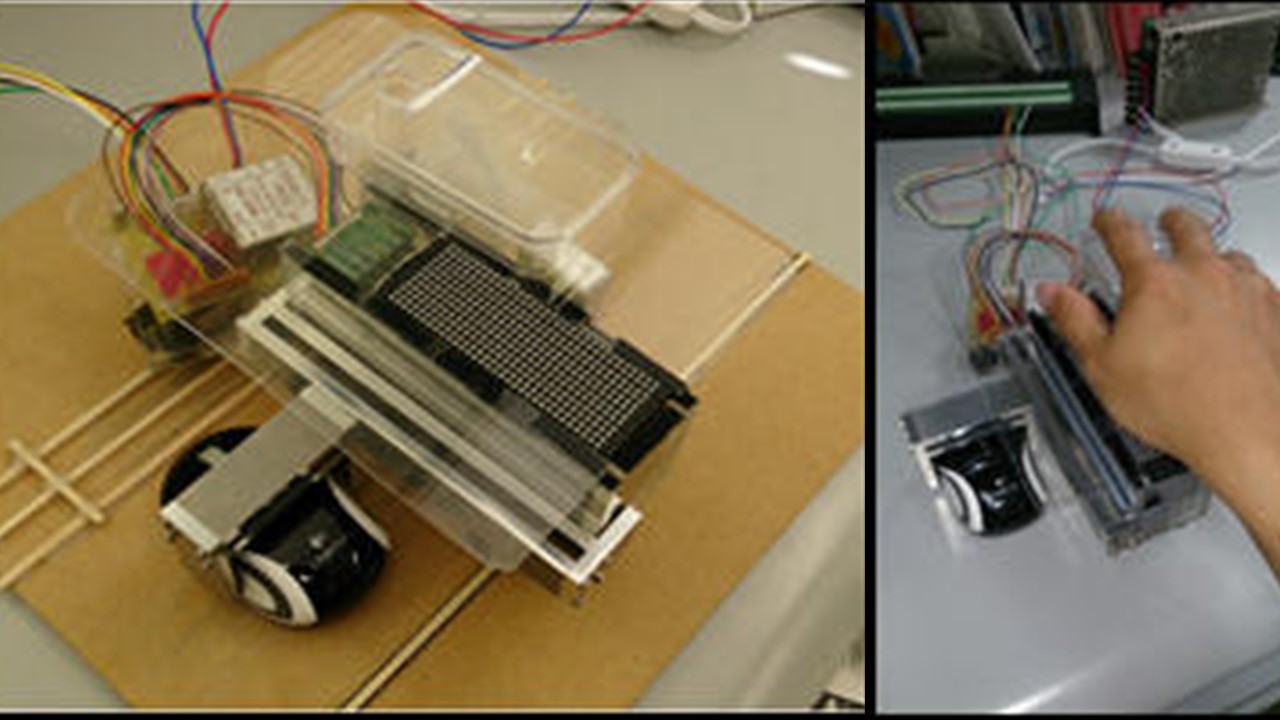
(左から順に、触覚マウスの全景(動画)、触覚マウスに掌を載せいるところ、実験結果:触覚ディスプレイ,金網,二本鋼線の比較(Referenceは本物のベルベット生地のすべすべの程度を表す)) |
|
触覚の確率共鳴に関する研究
|
|
概 要
触覚センシングでは,センサで対象表面上をなぞって動かすために必然的にノイズが混入する.一方,生物においてよく見られる確率共鳴現象とは,非線形・多安定なニューロンの特性と外部ノイズが共鳴して閾下の微弱な信号入力でもニューロンの興奮が生じる現象である.本論文では,上述の触覚センシングと確率共鳴の両者の特性を有効に利用して,不可避なノイズを印加することにより感度を高めるといった触覚センシング方式を新しく提案する.
基礎研究として,振幅数ミクロンの微小振動を発生させ,それに白色ノイズを重畳させて被験者に判定させる実験を行っている(実験風景は右).ノイズを重畳させた方が振幅の判定精度が向上することがわかった.ニューラルネットワークによるシミュレーションも併せ行っている.
この研究の新規性・独創性
ノイズによって振動の振幅の判定精度が向上する現象については,本研究室で初めて確認されたものである.これによって,新しい確率共鳴のモデルを考案することができた.
応用研究
本研究の成果は,従来の触覚センサの検出精度や,触覚ディスプレイの呈示能力を飛躍的に向上させる研究に適用できる.
詳細情報
http://cdn.intechopen.com/pdfs/43950/InTech-Human_tactile_stochastic_resonance_affected_by_stimulus_direction.pdf#search=%2783.+Human+Tactile+Stochastic+Resonance+Affected+by+Stimulus+Direction%27
|
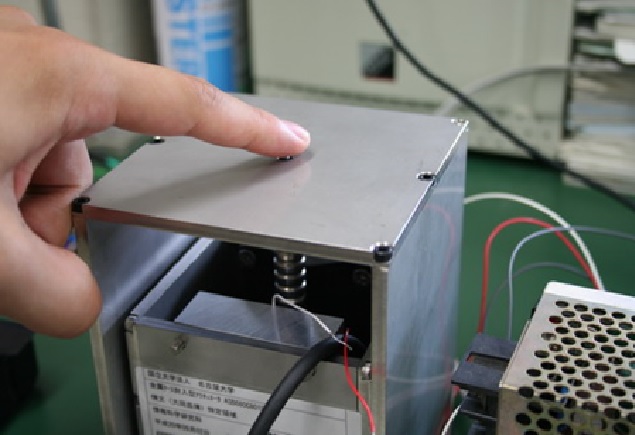

(左:ピエゾアクチュエータにより数ミクロン程度の振動刺激を生成、右:ノイズを重畳させてその微小な振動刺激の変化を評価する) |
|
有限要素法による触覚認識機構の解明に関する研究
|
|
概 要
触覚の受容器(機械受容器)に加えられる刺激を見積もる手段として,計算力学は有力な手法である.ここでは,有限要素法により指内の機械受容器に作用する刺激を評価している.
右図は前述のVHIをシミュレーションした結果である.上と下の図はそれぞれ両手と片手でワイヤを触った場合のMises応力の分布を示している.
このほか,確率共鳴現象についても,計算力学的手法によるアプローチからの研究を進めている.
この研究の新規性・独創性
心理物理実験の結果と併せて考察することにより,せん断刺激がVHIに及ぼす影響について明らかにできた.
応用研究
心理物理実験とシミュレーション結果をさらに蓄積することにより,将来触覚ディスプレイを実際に製作する前に呈示する感覚を前もって評価する技術へと発展する.
|
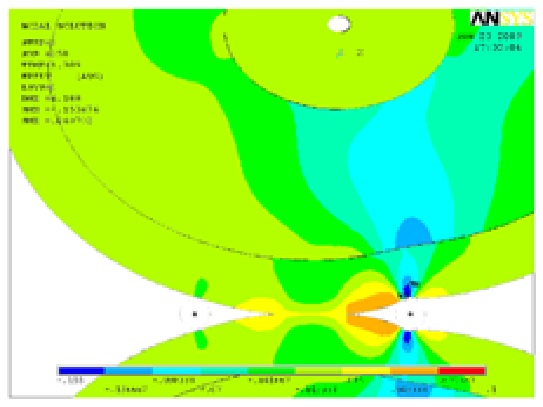 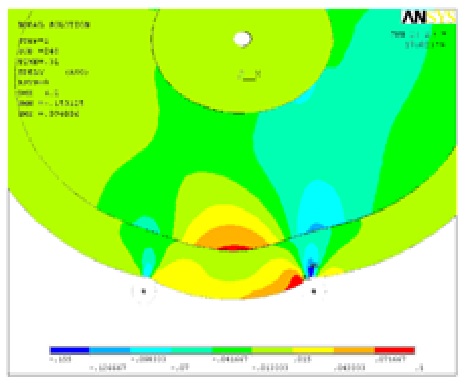
(左:二本の指で針金を挟んでこする場合の応力分布、右:一本の指で針金をこする場合の応力分布) |
|
新しい触覚センサの開発に関する研究
|
|
概 要
より広範囲の作業をロボットに課するために,指の腹や掌に装着してパワーグラスプにも耐えられる三軸触覚センサの開発が求められている.本研究では,高荷重にも耐える新しい光導波形三軸触覚センサの開発を行う.強度上問題となった円柱状の触子を廃することによって構造の簡素化を図る.圧力分布精度の向上を目指して,ランダムな凹凸を形成したシリコンゴムシートを使用する(
左図).
せん断力計測においては,アクリル板とゴムシートの間の接触の様子を撮像した画像からオプティカルフローを求めて,画素の移動量からせん断力を求める.垂直力については,輝度値の変化から同定する.以上のアルゴリズムの妥当性を検証するための実験も併せ行う(右図).
この研究の新規性・独創性
ハードウェアを単純化した分,ソフトウェアで補っている.従来の三軸触覚センサと比べて大幅に薄型化が可能となると同時に,耐荷重性能も飛躍的に向上できた.
応用研究
従来の三軸センサと組み合わせたハイブリッド型へと発展する予定である. |
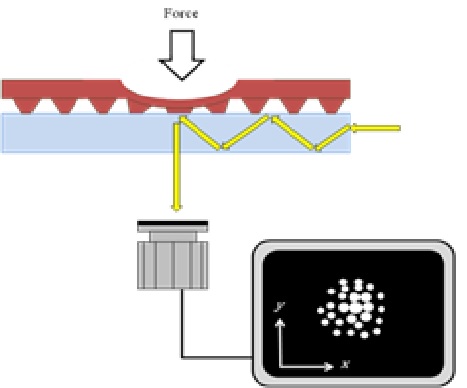
(左:光導波形三軸触覚センサの原理、右:既知荷重を加えた場合のセンサ出力のテスト) |
|
触覚のバーチャルリアリティに関する研究
|
|
概 要
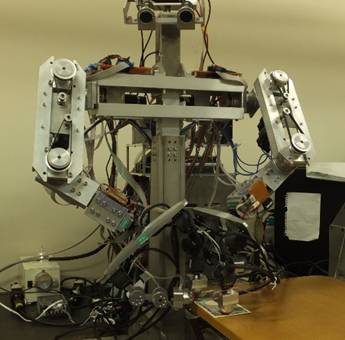
圧覚と滑り覚を同時に呈示できる品位の高い触覚ディスプレイを開発することを目的に,小型の二軸アクチュエータの開発を進めている(左図).本アクチュエータは1対のバイモルフPZT素子,3つの小リンク,3つの関節から構成されている.左右のPZT素子を別々に制御することにより,中央の関節を二次元空間内で自由に可動できる.
本アクチュエータに使用しているPZT素子のヒステリシスをセンサレスで補償するために,ニューラルネットワークによる制御法も併せて研究している.
多数の本アクチュエータから構成したアレイを指に装着したマスタハンド(右図:1軸アクチュエータアレイが搭載されている)に装着する.
この研究の新規性・独創性
本アクチュエータを多数アレイ状に配列すると,指さきに圧覚と滑り覚を同時に呈示できる触覚ディスプレイが構成できる.このような触覚ディスプレイによると表面の凹凸だけでなく指の表面を物体が滑る様子も呈示できるため、従来の装置では不可能であった高い現実感のある新しいバーチャル・リアリティが実現できる. |

(左:二軸アクチュエータ、右:触覚ディスプレイを搭載したマスタハンド) |
